SeeedStudio Motorshield V2 with STP 42D206 Stepper
I was trying to use a STP42D306 stepper with a SeeedStudio Motor Shield V2 on an Arduino. This is a bipolar 2 phase stepper motor. I needed to modify the code to get it working as the SeeedStudio example is for a Unipolar motor. The code used is below. And here’s a pic of the setup:
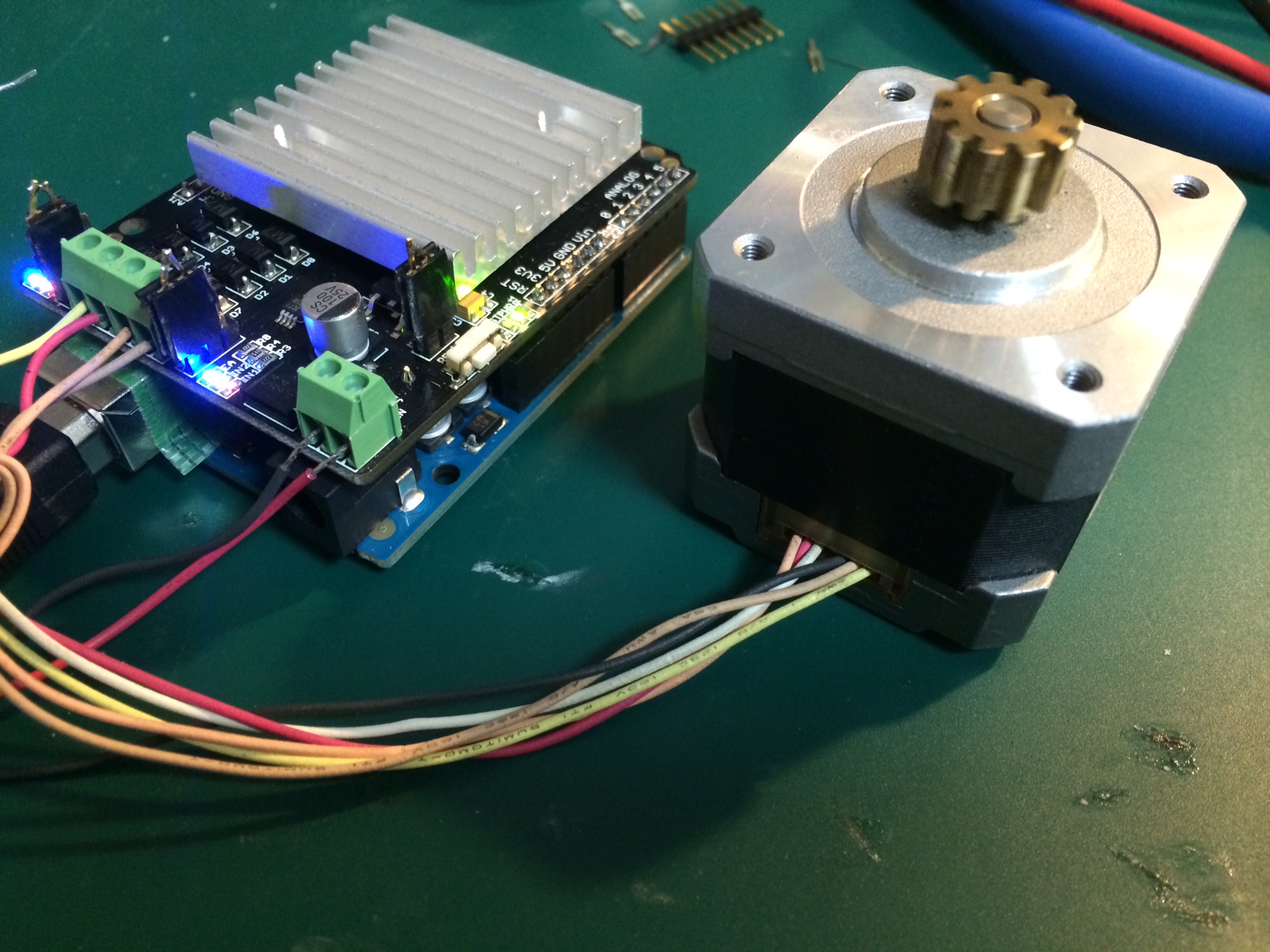
No guarantee that I’ve done it correctly, but the motor spins clockwise/anticlockwise. There are some nice diagrams of the stepping process here.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 | // Demo function:The application method to drive the stepper motor.// Hareware:Stepper motor - 24BYJ48,Seeed's Motor Shield v2.0// Author:Frankie.Chu// Date:20 November, 2012#define MOTOR_CLOCKWISE 0#define MOTOR_ANTICLOCKWISE 1/******Pins definitions*************/#define MOTORSHIELD_IN1 8//8#define MOTORSHIELD_IN2 11//11#define MOTORSHIELD_IN3 12//12#define MOTORSHIELD_IN4 13//13#define CTRLPIN_A 9//9#define CTRLPIN_B 10//10const unsigned char stepper_ctrl[]={0x27,0x36,0x1e,0x0f};struct MotorStruct{ int8_t speed; uint8_t direction;};MotorStruct stepperMotor;unsigned int number_of_steps = 200;/**********************************************************************//*Function: Get the stepper motor rotate *//*Parameter:-int steps,the total steps and the direction the motor rotates.*//* if steps > 0,rotates anticlockwise, *//* if steps < 0,rotates clockwise. *//*Return: void */void step(int steps){ int steps_left = abs(steps)*4; int step_number; int millis_delay = 60L * 1000L /number_of_steps/(stepperMotor.speed + 50);delay(millis_delay); if (steps > 0) { stepperMotor.direction= MOTOR_ANTICLOCKWISE; step_number = 0; } else if (steps < 0) { stepperMotor.direction= MOTOR_CLOCKWISE; step_number = number_of_steps; } else return; while(steps_left > 0) { if(step_number%4 == 0) { digitalWrite(MOTORSHIELD_IN1,1); digitalWrite(MOTORSHIELD_IN2,0); digitalWrite(MOTORSHIELD_IN3,0); digitalWrite(MOTORSHIELD_IN4,0); digitalWrite(CTRLPIN_A,1); digitalWrite(CTRLPIN_B,0); } if(step_number%4 == 1) { digitalWrite(MOTORSHIELD_IN1,0); digitalWrite(MOTORSHIELD_IN2,0); digitalWrite(MOTORSHIELD_IN3,1); digitalWrite(MOTORSHIELD_IN4,0); digitalWrite(CTRLPIN_A,0); digitalWrite(CTRLPIN_B,1); } if(step_number%4 == 2) { digitalWrite(MOTORSHIELD_IN1,0); digitalWrite(MOTORSHIELD_IN2,1); digitalWrite(MOTORSHIELD_IN3,0); digitalWrite(MOTORSHIELD_IN4,0); digitalWrite(CTRLPIN_A,1); digitalWrite(CTRLPIN_B,0); } if(step_number%4 == 3) { digitalWrite(MOTORSHIELD_IN1,0); digitalWrite(MOTORSHIELD_IN2,0); digitalWrite(MOTORSHIELD_IN3,0); digitalWrite(MOTORSHIELD_IN4,1); digitalWrite(CTRLPIN_A,0); digitalWrite(CTRLPIN_B,1); } //PORTB = stepper_ctrl[step_number%4]; delay(millis_delay); if(stepperMotor.direction== MOTOR_ANTICLOCKWISE) { step_number++; if (step_number == number_of_steps) step_number = 0; } else { step_number--; if (step_number == 0) step_number = number_of_steps; } steps_left --; }}void initialize(){ pinMode(MOTORSHIELD_IN1,OUTPUT); pinMode(MOTORSHIELD_IN2,OUTPUT); pinMode(MOTORSHIELD_IN3,OUTPUT); pinMode(MOTORSHIELD_IN4,OUTPUT); pinMode(CTRLPIN_A,OUTPUT); pinMode(CTRLPIN_B,OUTPUT); stop(); stepperMotor.speed = 1; stepperMotor.direction = MOTOR_CLOCKWISE;}/*******************************************/void stop(){ /*Unenble the pin, to stop the motor. */ digitalWrite(CTRLPIN_A,LOW); digitalWrite(CTRLPIN_B,LOW);}void setup(){ initialize();//Initialization for the stepper motor.}void loop(){ step(200);//Stepper motors rotate anticlockwise 200 steps. delay(1000); step(-200);//Stepper motors rotate clockwise 200 steps. delay(1000);} |
Thank you !
[…] http://41j.com/blog/2014/05/seeedstudio-motorshiel… […]
Thank you!! It works!!