Cutting down LCDs
I’ve been looking for a new LCD for my old watch project but nothing I’ve come across has quite the right specifications, they’re usually just a little bigger than I’d like. So I thought I’d look into cutting down existing LCDs to suit my application. It looks like this has been done in some contexts before.
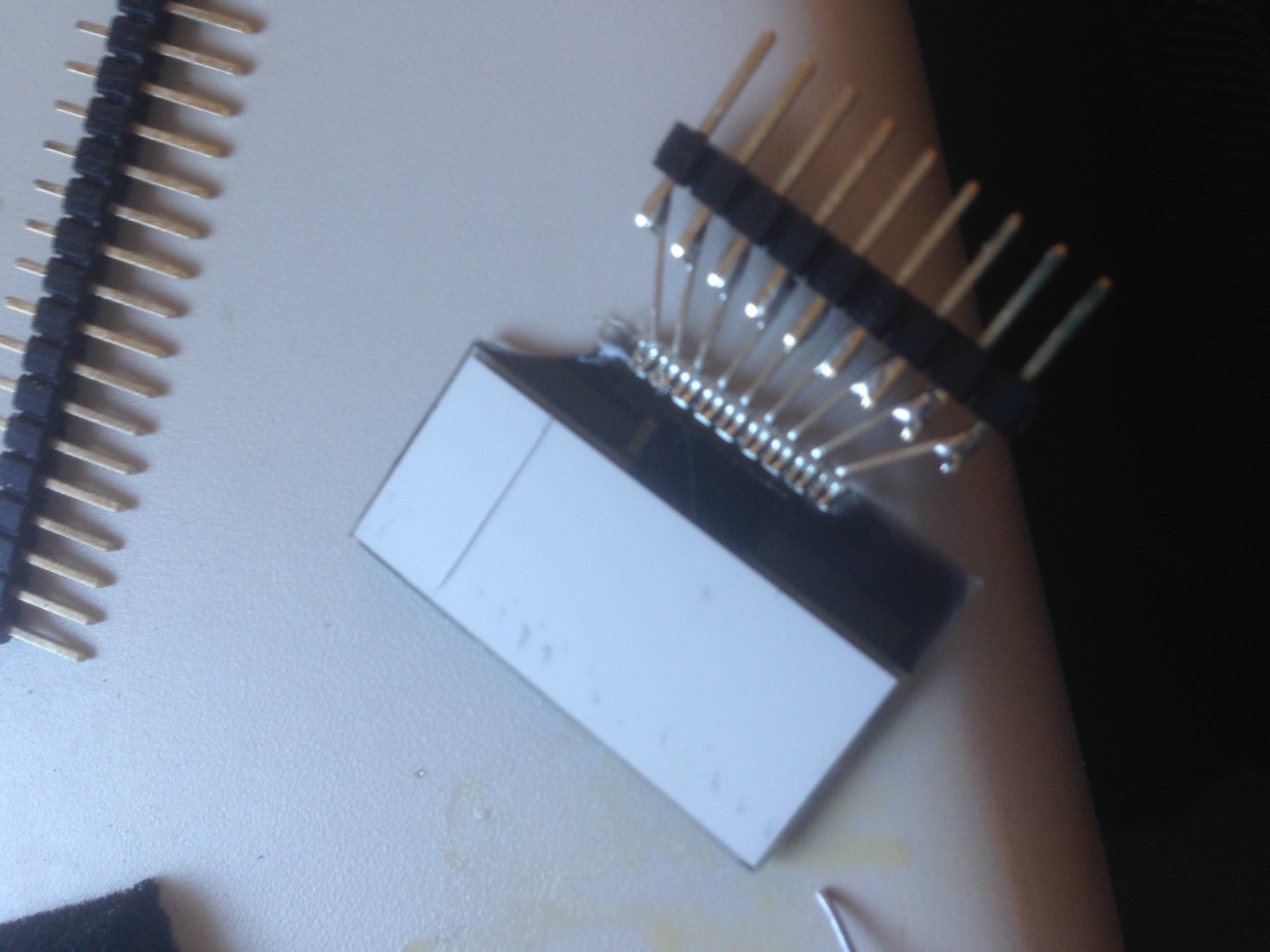
This was the LCD I started with:

It’s the 2 line alphanumeric/matrix display I’ve talked about before. Here’s a pic of the rear side:
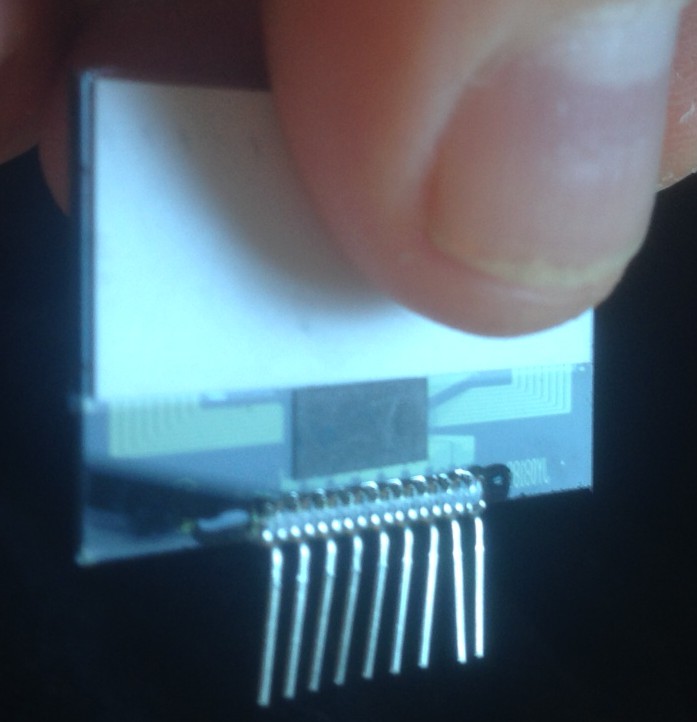
You can see the tape over the LCD controller and just about see 3 sets of traces, going left, right, and straight up into the glass. When I look at the traces under a microscope, I could clearly see the left and right sets of traces going to the top and bottom rows respectively.
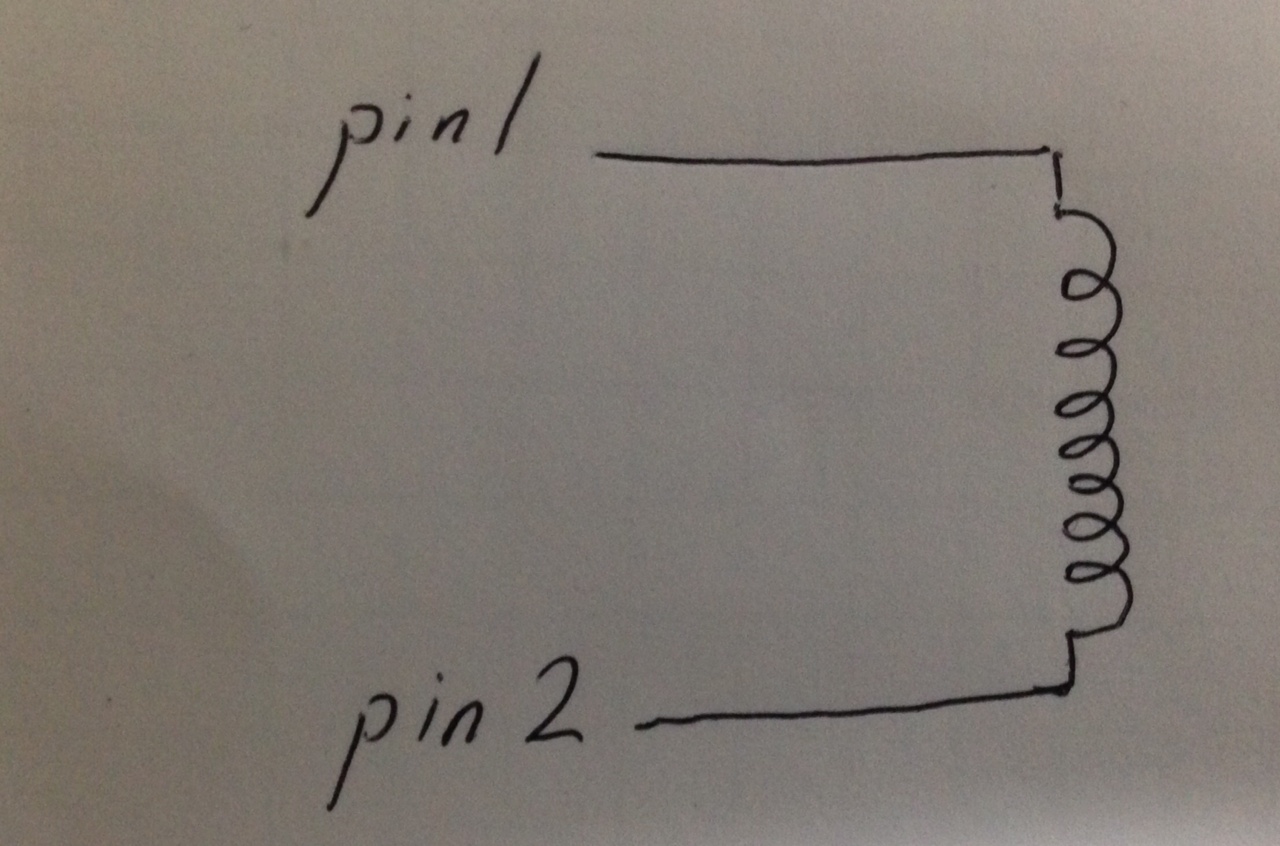
It seemed logical that the central traces were going to each row in the matrix and the left and right banks to the columns for the 2 lines. I decided to cut the display down such that one line was disabled, making the LCD thinner.
Breaking some of the traces confirmed that they were driving only one row of text (the bottom row in the above image). So I proceeded to cut the LCD down. First removing the reflective material on the back, and then the (I guess polarizing) plastic on the front.
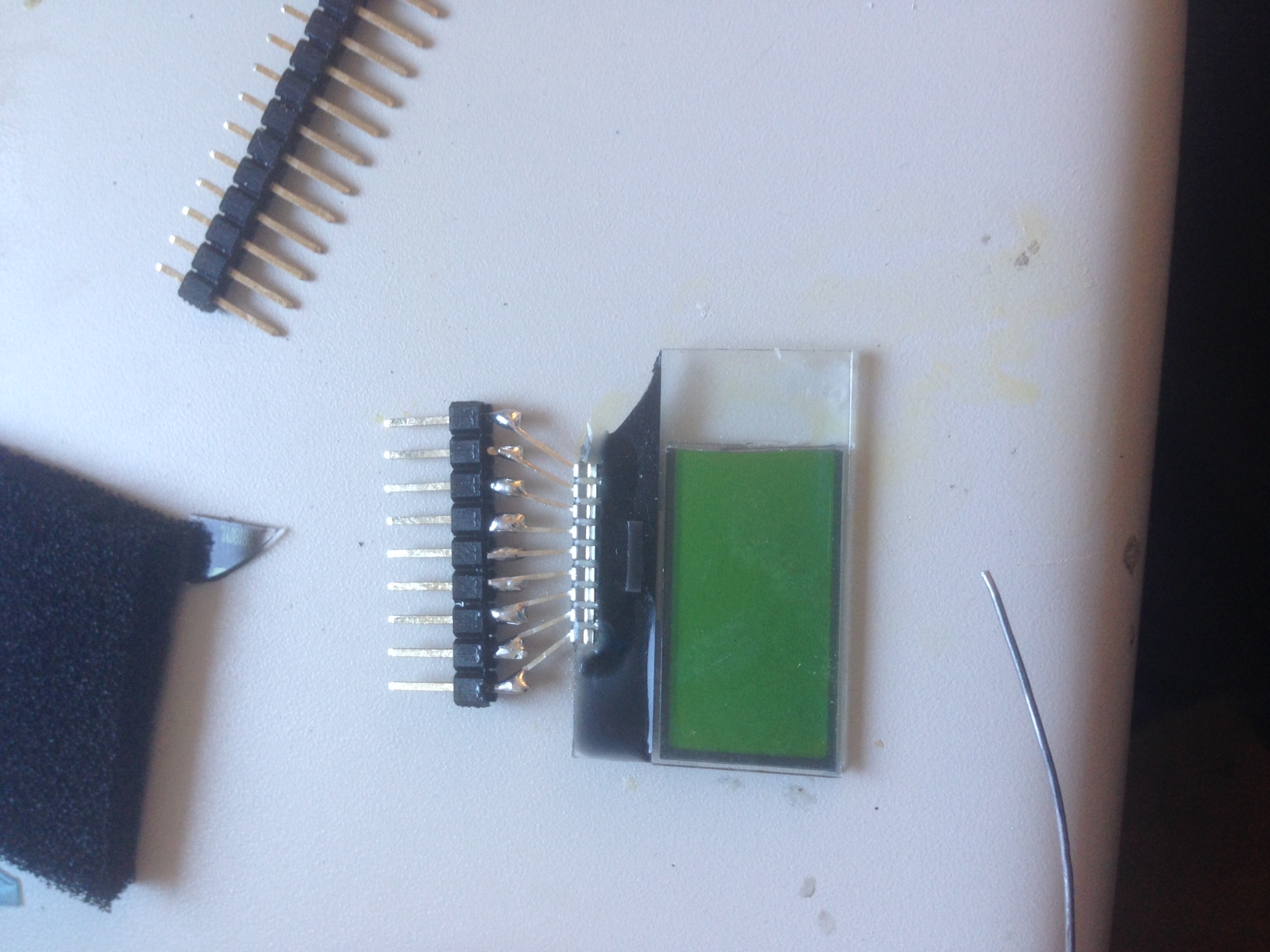
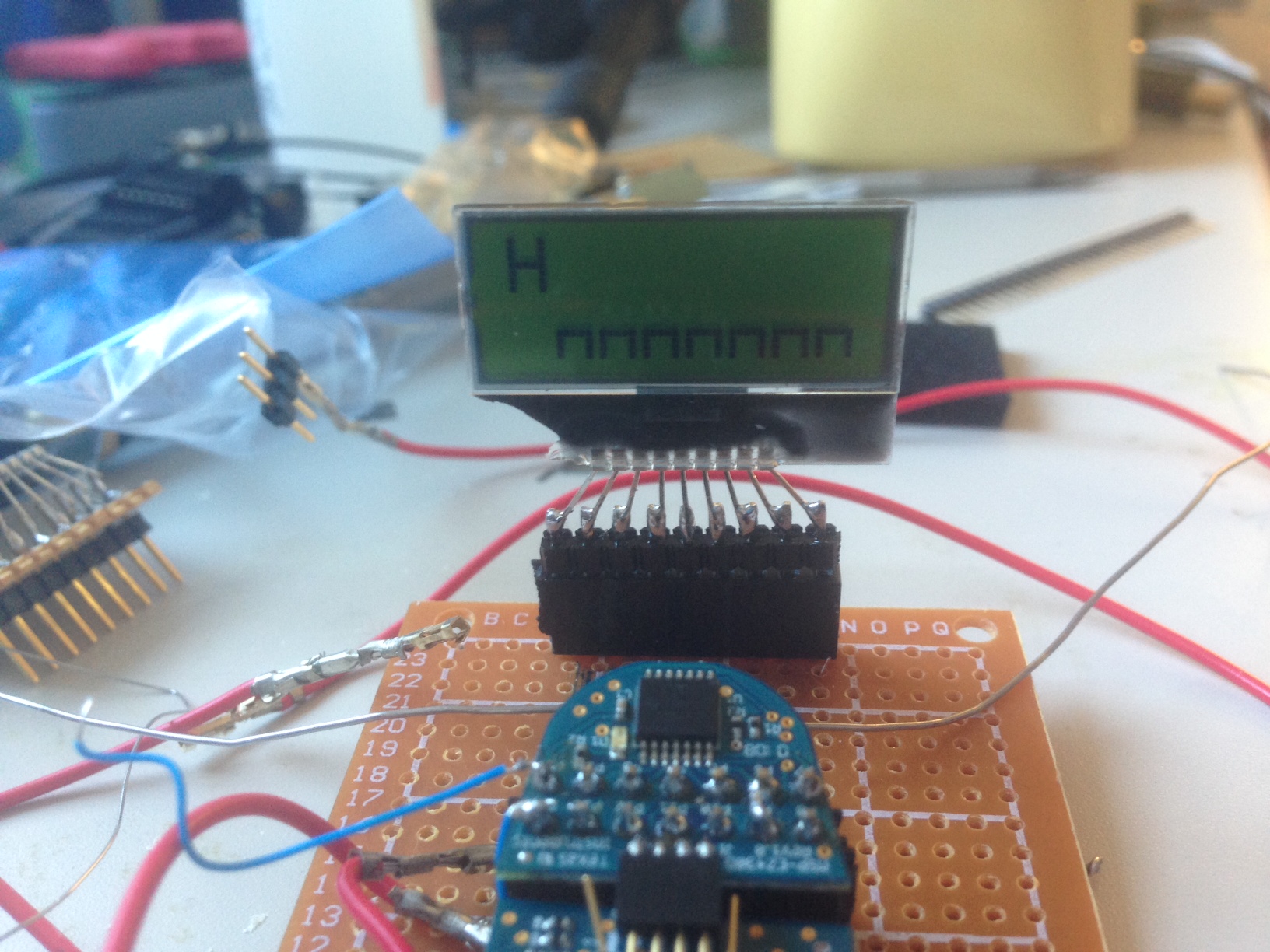
I scored the glass with a glass cutter and carefully snapped it, after installation everything worked perfectly!

Next I’d like to try preserving the bottom rather than the top row. I also understand that it’s a good idea to seal the LCD. I may also try milling the glass rather than snapping it, as I hear that can work pretty well.
Update: trimming off the other side also works.