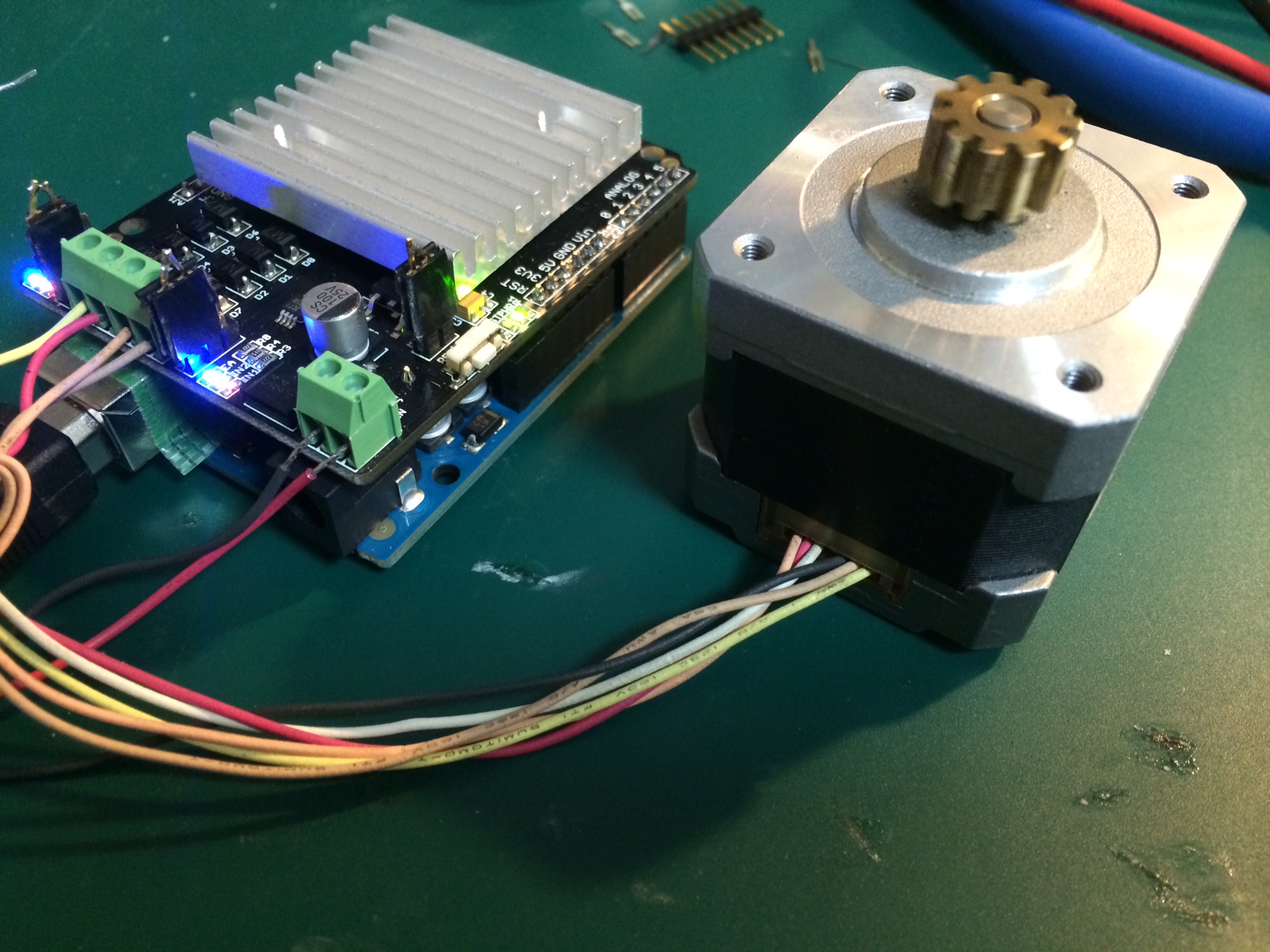
I was trying to use a STP42D306 stepper with a SeeedStudio Motor Shield V2 on an Arduino. This is a bipolar 2 phase stepper motor. I needed to modify the code to get it working as the SeeedStudio example is for a Unipolar motor. The code used is below. And here’s a pic of the setup:
No guarantee that I’ve done it correctly, but the motor spins clockwise/anticlockwise. There are some nice diagrams of the stepping process here.
// Demo function:The application method to drive the stepper motor.
// Hareware:Stepper motor - 24BYJ48,Seeed's Motor Shield v2.0
// Author:Frankie.Chu
// Date:20 November, 2012
#define MOTOR_CLOCKWISE 0
#define MOTOR_ANTICLOCKWISE 1
/******Pins definitions*************/
#define MOTORSHIELD_IN1 8//8
#define MOTORSHIELD_IN2 11//11
#define MOTORSHIELD_IN3 12//12
#define MOTORSHIELD_IN4 13//13
#define CTRLPIN_A 9//9
#define CTRLPIN_B 10//10
const unsigned char stepper_ctrl[]={0x27,0x36,0x1e,0x0f};
struct MotorStruct
{
int8_t speed;
uint8_t direction;
};
MotorStruct stepperMotor;
unsigned int number_of_steps = 200;
/**********************************************************************/
/*Function: Get the stepper motor rotate */
/*Parameter:-int steps,the total steps and the direction the motor rotates.*/
/* if steps > 0,rotates anticlockwise, */
/* if steps < 0,rotates clockwise. */
/*Return: void */
void step(int steps)
{
int steps_left = abs(steps)*4;
int step_number;
int millis_delay = 60L * 1000L /number_of_steps/(stepperMotor.speed + 50);
delay(millis_delay);
if (steps > 0)
{
stepperMotor.direction= MOTOR_ANTICLOCKWISE;
step_number = 0;
}
else if (steps < 0)
{
stepperMotor.direction= MOTOR_CLOCKWISE;
step_number = number_of_steps;
}
else return;
while(steps_left > 0)
{
if(step_number%4 == 0) {
digitalWrite(MOTORSHIELD_IN1,1);
digitalWrite(MOTORSHIELD_IN2,0);
digitalWrite(MOTORSHIELD_IN3,0);
digitalWrite(MOTORSHIELD_IN4,0);
digitalWrite(CTRLPIN_A,1);
digitalWrite(CTRLPIN_B,0);
}
if(step_number%4 == 1) {
digitalWrite(MOTORSHIELD_IN1,0);
digitalWrite(MOTORSHIELD_IN2,0);
digitalWrite(MOTORSHIELD_IN3,1);
digitalWrite(MOTORSHIELD_IN4,0);
digitalWrite(CTRLPIN_A,0);
digitalWrite(CTRLPIN_B,1);
}
if(step_number%4 == 2) {
digitalWrite(MOTORSHIELD_IN1,0);
digitalWrite(MOTORSHIELD_IN2,1);
digitalWrite(MOTORSHIELD_IN3,0);
digitalWrite(MOTORSHIELD_IN4,0);
digitalWrite(CTRLPIN_A,1);
digitalWrite(CTRLPIN_B,0);
}
if(step_number%4 == 3) {
digitalWrite(MOTORSHIELD_IN1,0);
digitalWrite(MOTORSHIELD_IN2,0);
digitalWrite(MOTORSHIELD_IN3,0);
digitalWrite(MOTORSHIELD_IN4,1);
digitalWrite(CTRLPIN_A,0);
digitalWrite(CTRLPIN_B,1);
}
//PORTB = stepper_ctrl[step_number%4];
delay(millis_delay);
if(stepperMotor.direction== MOTOR_ANTICLOCKWISE)
{
step_number++;
if (step_number == number_of_steps)
step_number = 0;
}
else
{
step_number--;
if (step_number == 0)
step_number = number_of_steps;
}
steps_left --;
}
}
void initialize()
{
pinMode(MOTORSHIELD_IN1,OUTPUT);
pinMode(MOTORSHIELD_IN2,OUTPUT);
pinMode(MOTORSHIELD_IN3,OUTPUT);
pinMode(MOTORSHIELD_IN4,OUTPUT);
pinMode(CTRLPIN_A,OUTPUT);
pinMode(CTRLPIN_B,OUTPUT);
stop();
stepperMotor.speed = 1;
stepperMotor.direction = MOTOR_CLOCKWISE;
}
/*******************************************/
void stop()
{
/*Unenble the pin, to stop the motor. */
digitalWrite(CTRLPIN_A,LOW);
digitalWrite(CTRLPIN_B,LOW);
}
void setup()
{
initialize();//Initialization for the stepper motor.
}
void loop()
{
step(200);//Stepper motors rotate anticlockwise 200 steps.
delay(1000);
step(-200);//Stepper motors rotate clockwise 200 steps.
delay(1000);
}